
Desde que era pequeño, siempre he tenido una pasión por los carros a control remoto. Me fascinaban aquellos que podían moverse en terrenos difíciles como la arena o el barro. Mi mayor interés estaba en los vehículos con tracción en las cuatro ruedas (4×4), ya que su complejidad mecánica añadía un desafío adicional, algo que siempre me ha atraído profundamente.
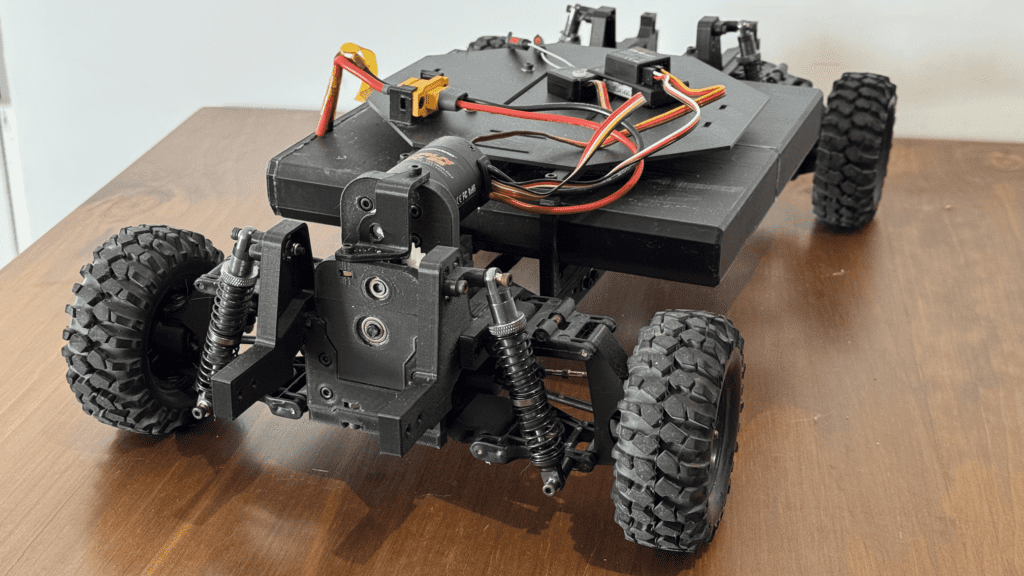
Con el paso del tiempo, esa afición se transformó en un proyecto más ambicioso: diseñar un vehículo todoterreno impreso en 3D que funcione como una plataforma versátil, permitiendo la integración de diferentes componentes según sea necesario. Desde una cámara para filmación, hasta un brazo robótico o incluso cepillos de limpieza, las posibilidades son infinitas. Mi enfoque principal ha sido crear un diseño base robusto y adaptable, y de eso trata esta página: consolidar y mostrar el vehículo que he diseñado, para que puedas imprimirlo y construirlo en casa.
Aunque pueda parecer complicado, te aseguro que este proyecto es mucho más fácil de lo que parece. Con un poco de paciencia y siguiendo los pasos que te mostraré, tú también podrás tener tu propio vehículo 4×4 personalizado.
El diseño de la primera versión se hizo en base a componentes mecánicos que extraje de un carro de control remoto antiguo y por eso, no es posible que repliques este diseño. Sería una coincidencia muy grande que tengas un vehículo similar al que tenía yo, pero de todas formas dejo por aquí unas fotos que extraje de un blog y que muestra el tipo de vehículos en cuestión:

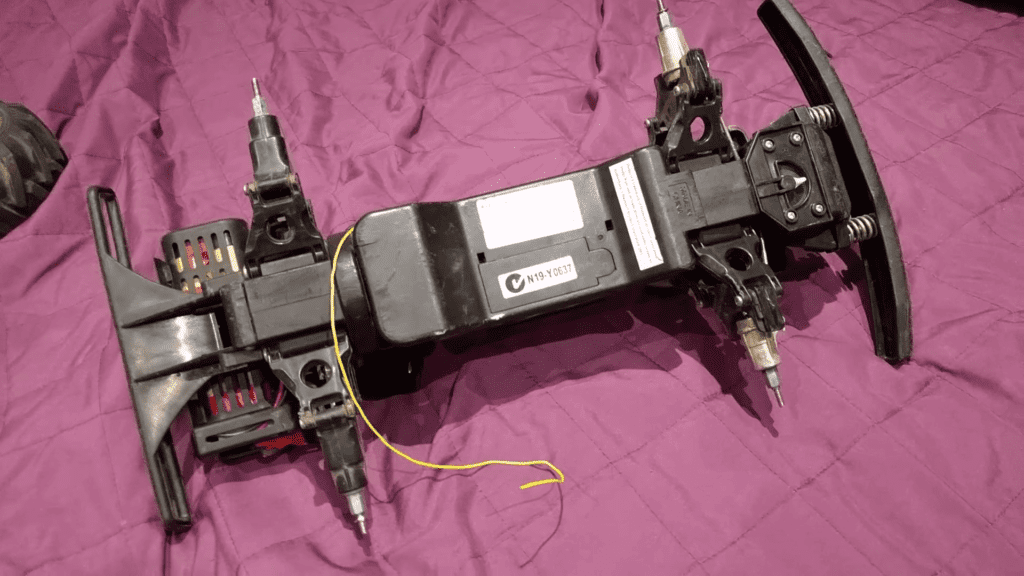
Viendo la dificultad de que exista esta coincidencia es que surge la versión II. La idea es que quien quiera imprimir este vehículo, pueda conseguir los componentes en tiendas locales o por internet de manera sencilla.
Vehículos no tripulados existentes
Claramente, diseñar y construir un vehículo como este, con otra intención que no sea recreativa, está ya bastante extendido y existen diversos modelos y tecnologías que vienen siendo usadas en la industria civil y militar. Si hacemos una búsqueda simple, podemos encontrar que un UGV (Unmanned Ground Vehicle) es un vehículo no tripulado que opera sobre el suelo (pueden ver una definición más amplia en Wikipedia).
A mi parecer, lo más cercano a una empresa que fabrique y brinde servicios con esta clase de vehículos, localizada en Latinoamérica es Tumi Robotics. Pero nosotros, por el momento, no tenemos la intención de diseñar un vehículo, ni tan grande en dimensiones ni con un despliegue tecnológico que sea extremadamente costoso o complejo. La intención es básica, construyamos un vehículo todoterreno impreso en 3D.
Concepto y planificación inicial
Antes de comenzar con el diseño y la construcción de tu vehículo 4×4, es esencial definir un concepto claro que guíe todo el proceso. En esta fase, tomaremos decisiones fundamentales sobre cómo será el vehículo, qué características tendrá y qué objetivos queremos cumplir. Esto nos ayudará a tener una visión clara antes de pasar al diseño y fabricación.
Objetivos
El objetivo principal es crear un vehículo que funcione como una plataforma tecnológica adaptable. A diferencia de los vehículos a control remoto convencionales, este diseño tiene la intención de servir como base para la implementación de diferentes módulos o herramientas, facilitando así la ampliación y personalización según los intereses o requerimientos del usuario.
De esta forma, definimos el primer requerimiento: soportar una amplia variedad de componentes, tales como:
- Cámaras para la grabación en movimiento o exploración remota.
- Sensores para medir variables como la temperatura, la humedad, la distancia o la detección de objetos.
- Brazos robóticos que permitan realizar tareas de manipulación o recolección de objetos.
- Cepillos o herramientas de limpieza, convirtiéndolo en una plataforma para tareas de mantenimiento automatizado.
- Plataformas de transporte para mover objetos ligeros en entornos industriales o domésticos.
- Dispositivos autónomos (controlados por software, IA, o sensores) que conviertan el vehículo en una herramienta útil para el desarrollo de aplicaciones de robótica.
Esta plataforma modular permitirá a los usuarios personalizar el vehículo y adaptarlo para distintas tareas, ya sea para fines recreativos, educativos o profesionales.
Entorno de trabajo
El vehículo 4×4 será diseñado para operar en una variedad de entornos, lo que lo hace útil para diferentes tipos de usuarios. Algunos ejemplos de entornos donde podría ser desplegado incluyen:
- Terrenos difíciles: La tracción en las cuatro ruedas (4×4) permitirá al vehículo desplazarse eficientemente por terrenos irregulares, como arena, barro, rocas o césped.
- Entornos controlados: En ambientes interiores, su configuración modular permitirá la integración de herramientas o sensores para tareas automatizadas como vigilancia, limpieza o manipulación.
- Exploración remota: Equipado con cámaras y sensores, el vehículo podrá ser utilizado para explorar áreas de difícil acceso o donde la intervención humana sea limitada.
Dicho esto, definimos el segundo requerimiento: operar en diferentes entornos y terrenos.
Componentes del vehículo
Para garantizar que el vehículo pueda soportar una amplia gama de componentes, la elección de motores, sistemas de tracción, baterías, y electrónica debe ser cuidadosa y flexible. A continuación, se destacan algunos puntos clave:
- Sistemas de tracción 4×4: Se seleccionarán motores potentes y sistemas de ejes que proporcionen la tracción y el torque necesarios para soportar tanto terrenos difíciles como una variedad de cargas adicionales. Esto garantizará que el vehículo pueda moverse sin esfuerzo incluso cuando esté equipado con accesorios pesados o sofisticados.
- Capacidad energética: Se deberá elegir una batería de alto rendimiento que permita no solo alimentar el sistema de tracción, sino también los módulos adicionales (cámaras, sensores, actuadores, etc.).
- Interfaz de control versátil: Desde un sistema básico de radio control (RC) hasta opciones más avanzadas de programación y control autónomo mediante Ardupilot o Pixhawk. El vehículo debe ser capaz de funcionar tanto de manera manual como autónoma, abriendo la posibilidad de utilizarlo en proyectos de robótica avanzada.
En este punto definimos el tercer requerimiento: dimensionar componentes mecánicos, eléctricos y electrónicos para operaciones de larga duración y con diferentes cargas de pago.
Limitaciones, desafíos y oportunidades
Si bien este proyecto ofrece un gran potencial, también es importante tener en cuenta algunas limitaciones que podrían surgir:
- Capacidad de carga limitada: Aunque el chasis será diseñado para soportar una variedad de componentes, habrá un límite práctico en cuanto al peso y la cantidad de accesorios que se puedan integrar simultáneamente.
- Presupuesto: Los costos pueden incrementarse si se opta por integrar componentes avanzados, como sensores o sistemas de inteligencia artificial. Sin embargo, la modularidad del vehículo permite un enfoque iterativo: empezar con lo básico e ir añadiendo elementos según el presupuesto y las necesidades.
- Tiempo de desarrollo: Dado que se trata de un proyecto que involucra diseño, impresión 3D, ensamblaje y pruebas, puede requerir una inversión considerable de tiempo, especialmente en la etapa de personalización y ajuste de componentes.
Iteración No. 1
La correcta selección de los componentes es uno de los aspectos más importantes para asegurar que el vehículo todoterreno impreso en 3D cumpla con su propósito de ser una plataforma flexible y adaptable. Cada elemento debe ser elegido con base en la funcionalidad, la eficiencia y la posibilidad de integrarse con facilidad en el vehículo.
En este post analizaremos los principales componentes que debes considerar:
[Todoterreno Titan II] Selección de componentes
Después del inicio del proyecto, iré compartiendo los avances en varias publicaciones hasta completarlo. Y, ¿por qué no?, más adelante podrían ver alguna entrada sobre mejoras …
Pedro Boada
Iteración No. 2
¡Empecemos a ensamblar el vehículo! En esta iteración vamos a enfocarnos en el proceso de ensamble de la primera parte del vehículo todoterreno impreso en 3D. Empezaremos por la parte frontal que contiene el tren delantero del vehículo, donde armaremos el mecanismo de la suspensión independiente y de dirección.