

En esta primera iteración del proyecto, el enfoque estará en el desarrollo y prototipado de los propulsores. El propulsor submarino es una parte crítica para cualquier vehículo subacuático, ya que determinan su capacidad para moverse de manera eficiente bajo el agua, maniobrar y alcanzar los objetivos de la misión. A continuación, describiré el proceso de diseño de las piezas, la selección de componentes mecánicos y electrónicos, y las primeras pruebas de funcionamiento.
Diseño del propulsor submarino
El primer paso en el desarrollo de los propulsores ha sido escoger el motor y hélice a emplear en este componente. Para garantizar una buena eficiencia hidrodinámica, opté por un diseño existente en el mercado, un conjunto de motor y hélice bastante fácil de conseguir. Al momento de realizar la compra, tengan en cuenta que es necesario instalar hélices en sentido horario y anti-horario porque ayuda a reducir el efecto de torque sobre el vehículo y proporciona mayor estabilidad.
Propulsor escogido
Motor brushless F2838-350kv
Disponible en giro horario y antihorario
Este propulsor me parece el componente adecuado para prototipar nuestro vehículo. Tiene un precio adecuado y está impermeabilizado.
Click para comprar
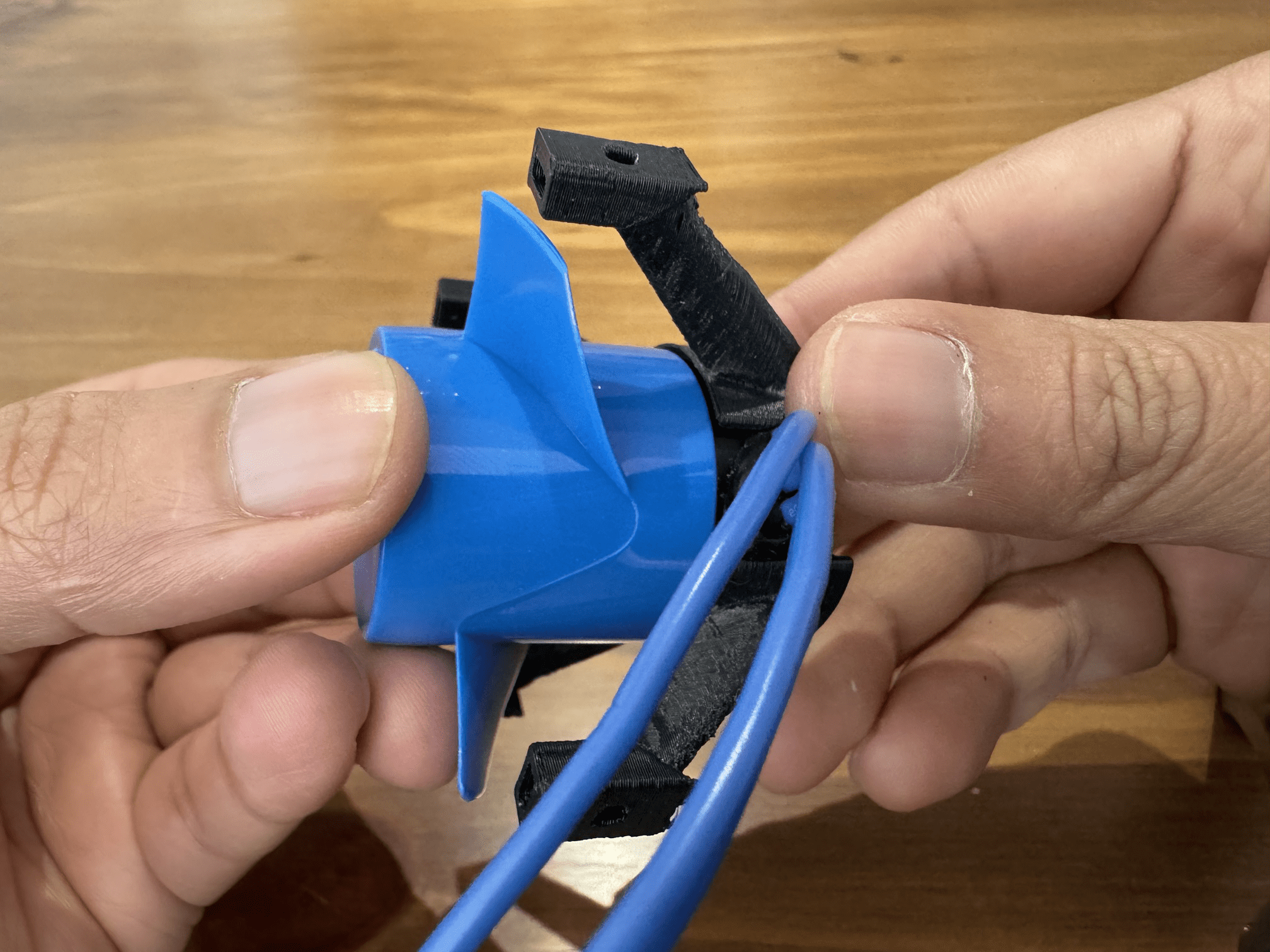
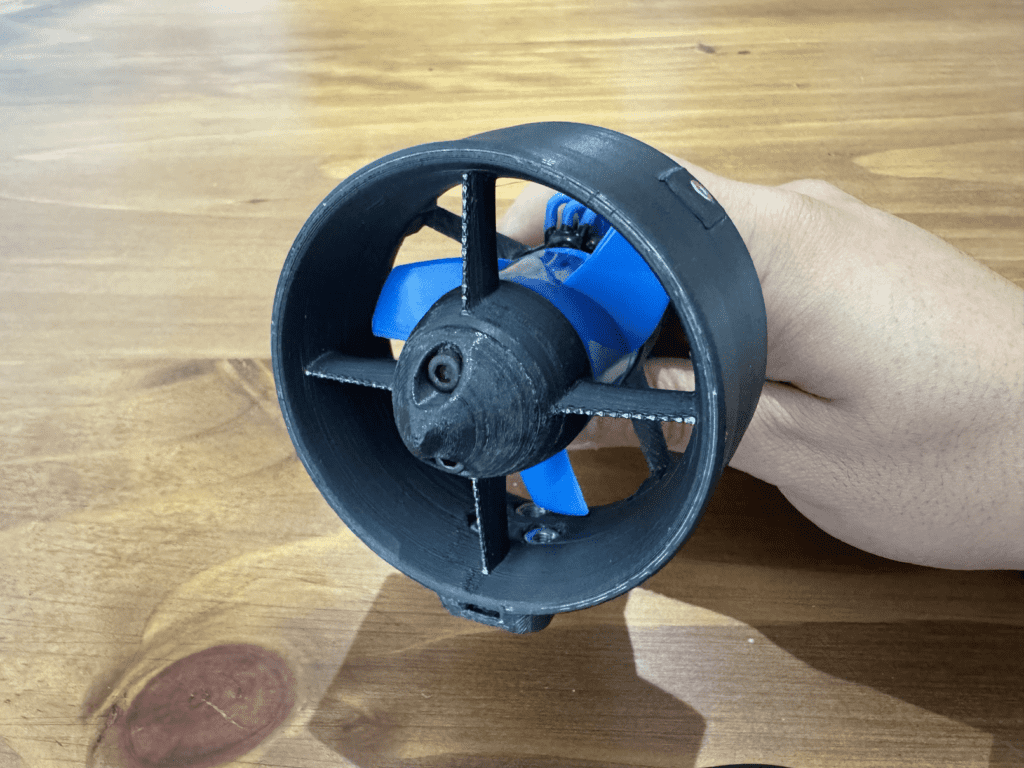
La carcasa de los propulsores será impresa en 3D, lo que permite personalizar las dimensiones y adaptarlas perfectamente a la estructura del AUV.
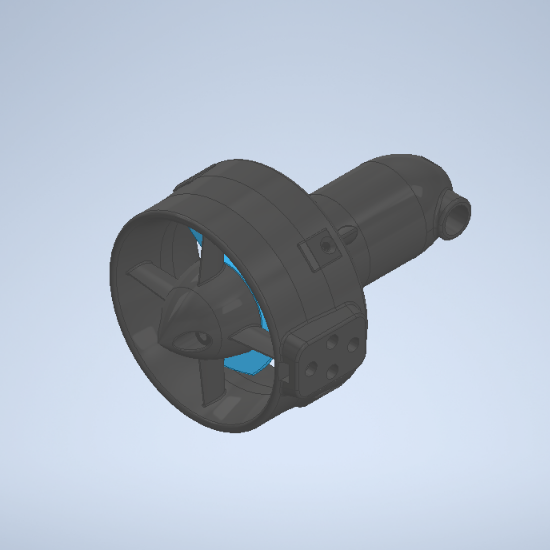
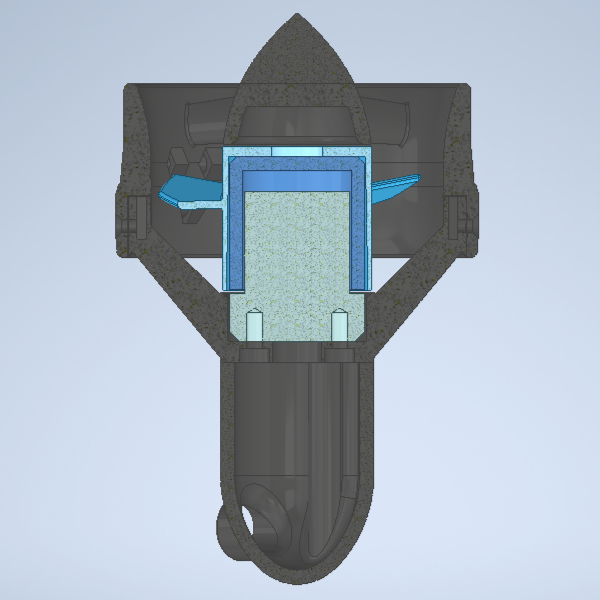
En la imagen superior muestro cómo he adaptado el diseño de la carcasa al propulsor seleccionado, garantizando un encaje bastante preciso. El material que recomiendo utilizar para este componente impreso es el PLA reforzado con fibra de carbono o el ASA, para asegurar una buena rigidez y tenacidad. También es una opción imprimir estas piezas en resina, para lo cual recomiendo usar alguna resina ABS o en su defecto resina PA (nylon), esto brinda bastante rigidez, mayor precisión y un acabado mucho más prolijo.
Carcasa del propulsor
Carcasa para propulsor F2838-350kv
Versión FDM o para impresora de resina disponibles
Entra al link y descarga los archivos, de esta forma nos ayudas a mantener el proyecto andando.
Click para comprarEnsamblaje del propulsor submarino
El ensamblaje del propulsor submarino es bastante intuitivo, pero previo a las instrucciones les dejo un listado de los materiales necesarios para ejecutar este procedimiento:
- (1x) Kit de motor y hélice F2838-350kv.
- (1x) Kit de piezas impresas.
- (4x) Perno M2.5×6 INOX de cabeza plana.
- (4x) Tuerca M2.5 INOX.
- (4x) Tuerca M4 INOX.
- (2x) Perno M3x8 INOX de cabeza cilíndrica.
- (2x) Tuerca M3 INOX.
Si vas a imprimir la carcasa en la versión FDM, necesitas agregar los siguientes componentes:
- (2x) Tuerca M3 INOX.
- (2x) Perno M3x8 INOX de cabeza cilíndrica.
Si vas a imprimir la versión que tiene dos superficies de apoyo, que es la usada en el ensamblaje de la estructura central del AUV, vas a necesitar adicionalmente:
- (4x) Tuerca M4 INOX.
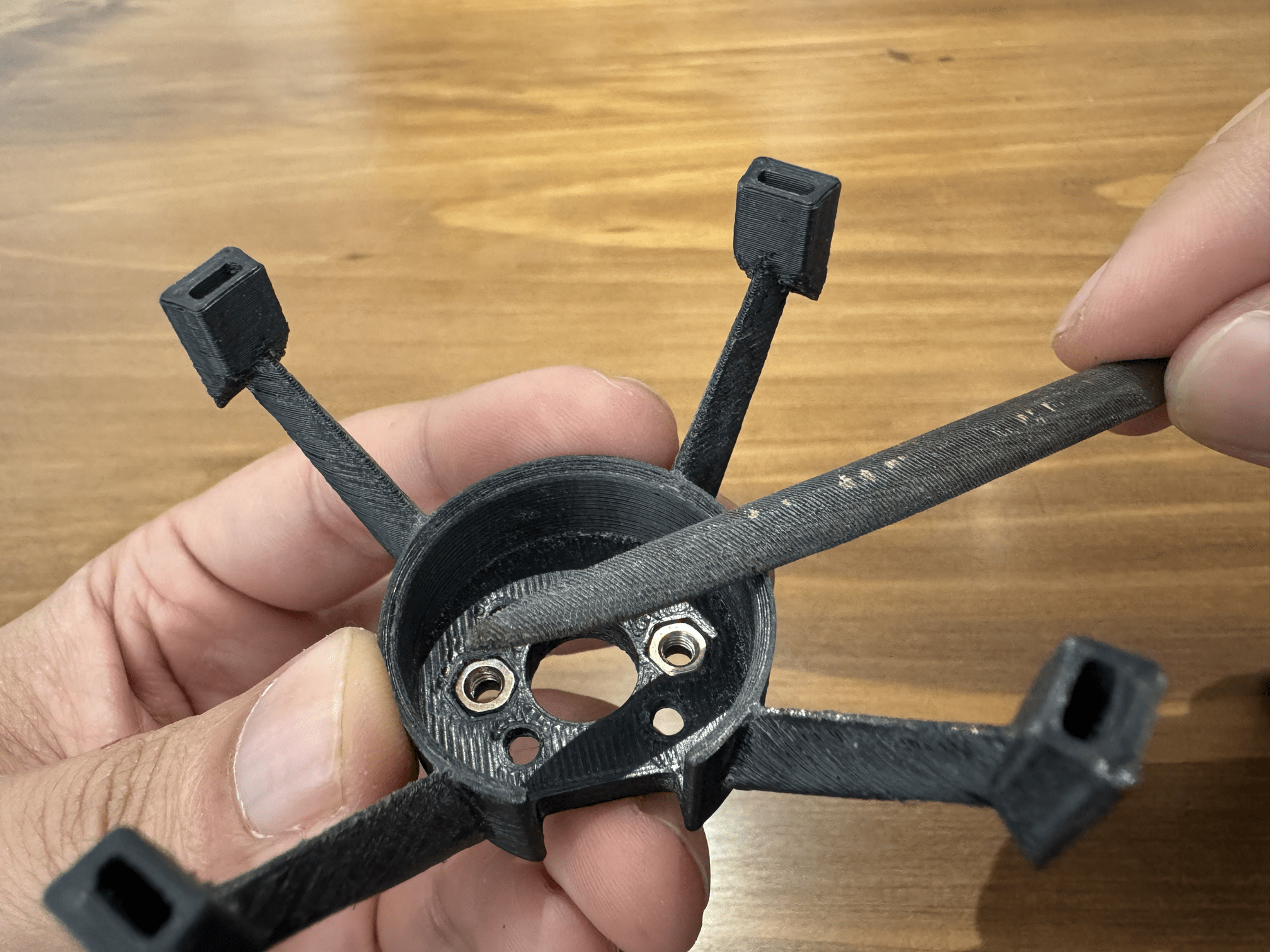
Paso 1
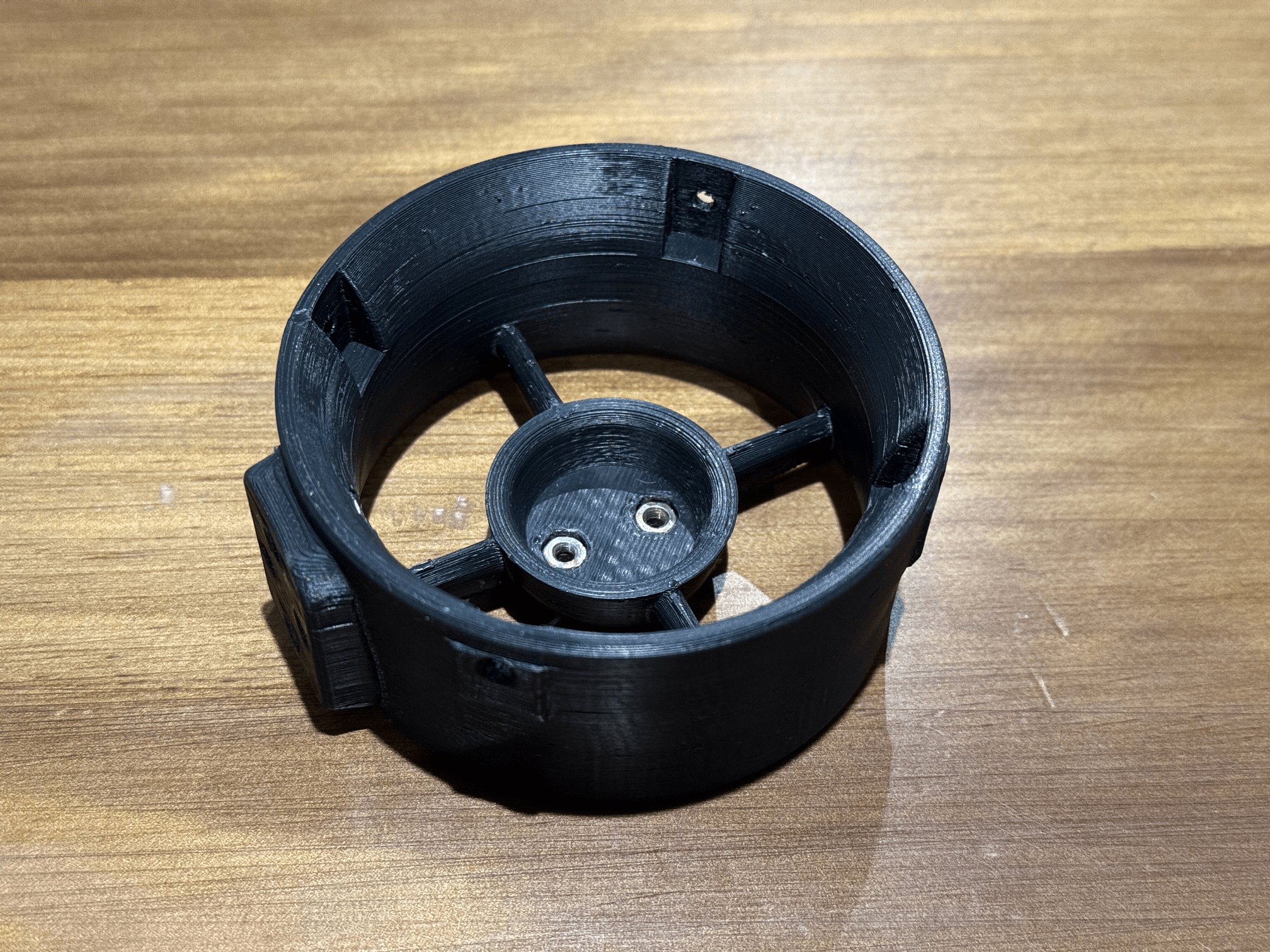
Inserta dos tuercas M3 en la base de la carcasa.

Paso 2
Asegúrate que el encaje entre la base y el ducto de la carcasa sea el correcto. Si las piezas no encajan con facilidad, utiliza una lima o lija para desgastar las superficies que no encajan bien.

Paso 3
Inserta el motor brushless en la base de la carcasa y atorníllalo por la parte posterior. Estos tornillos vienen incluidos cuando compras el motor, por lo que todo lo necesario ya está disponible.
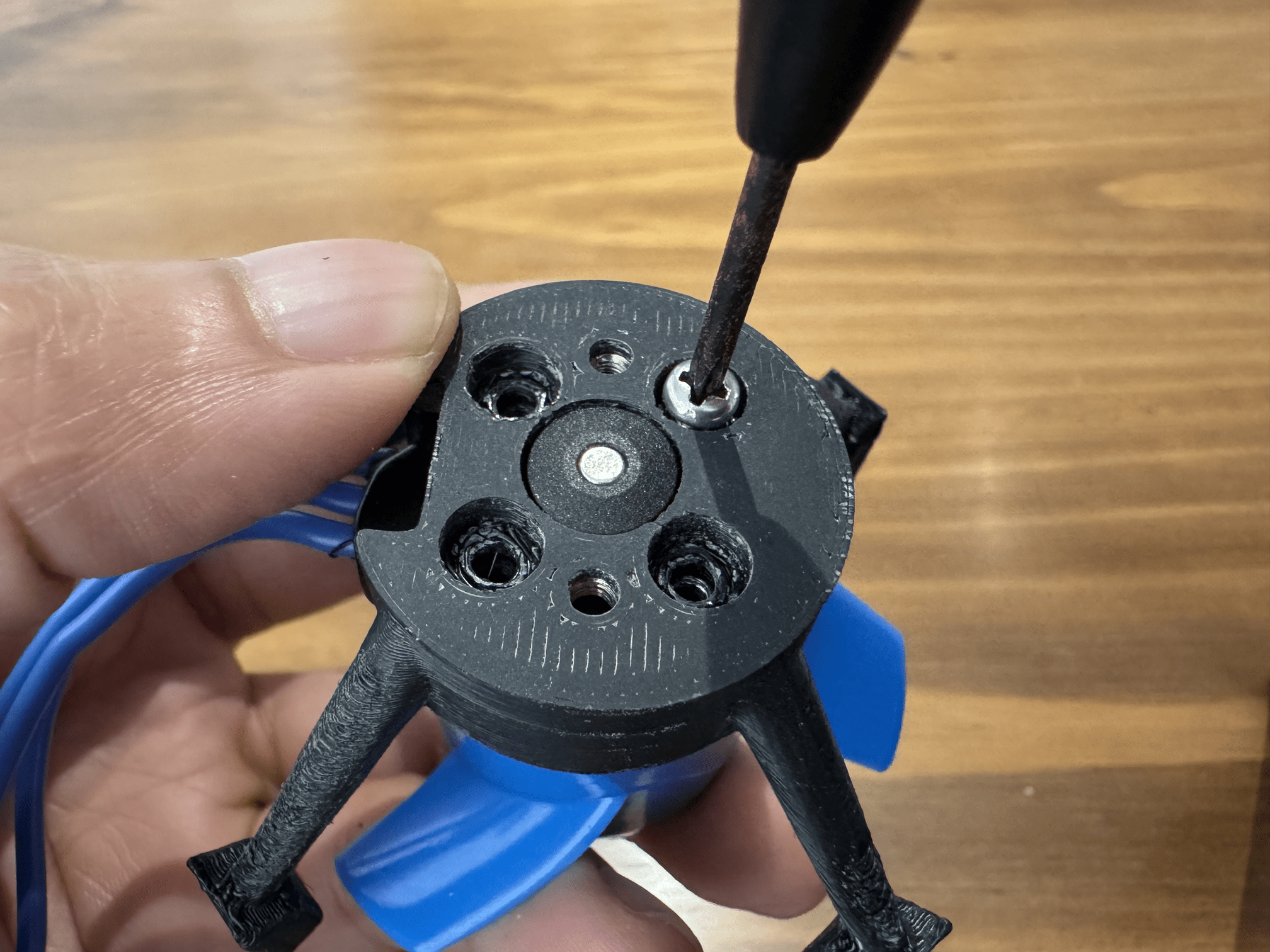
Gira la hélice con la mano y revisa que no tenga ningún impedimento para rotar con libertad. Si encuentras alguna resistencia, revisa por dónde podría estar el contacto con la base, desatornilla el motor y utiliza una lima o una lija para desgastar la zona que opone resistencia al giro.
La hélice debe girar totalmente libre.
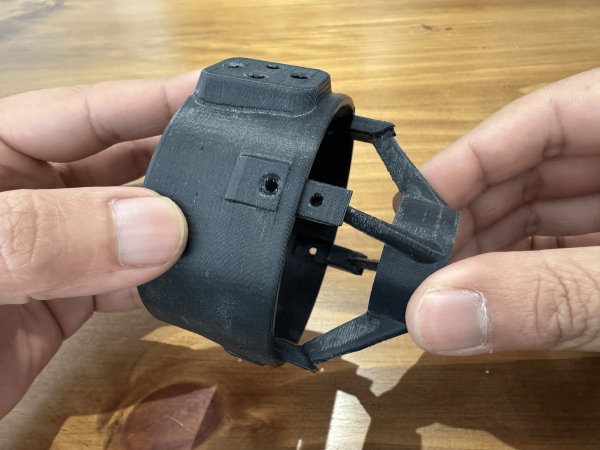
Paso 4
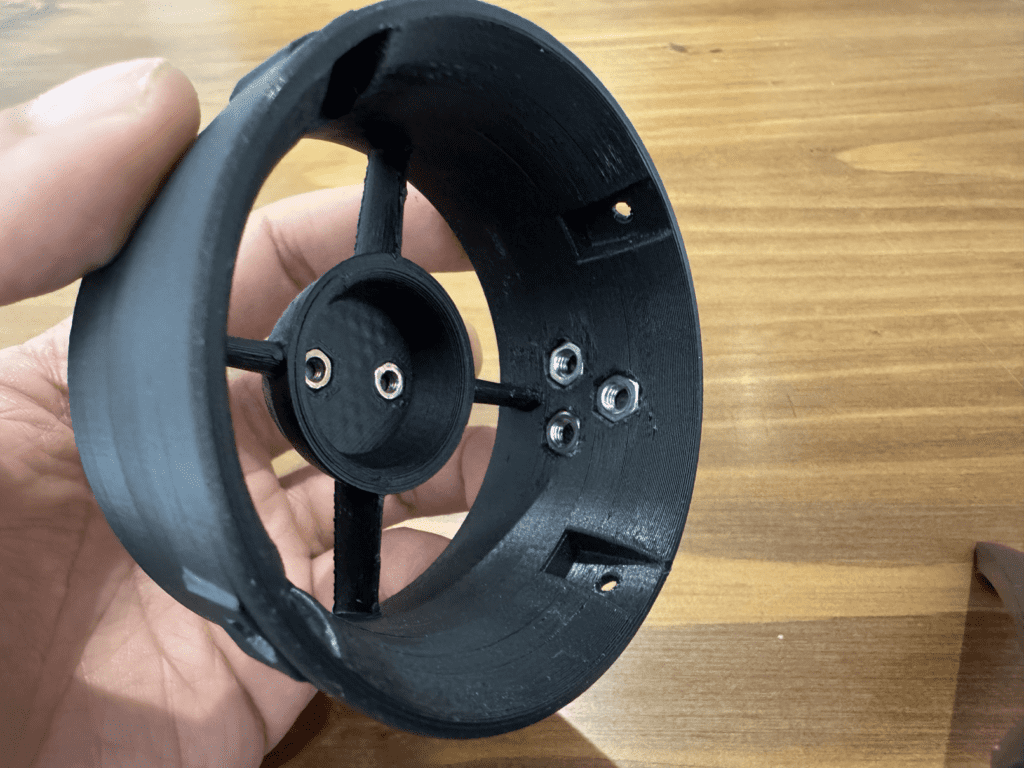
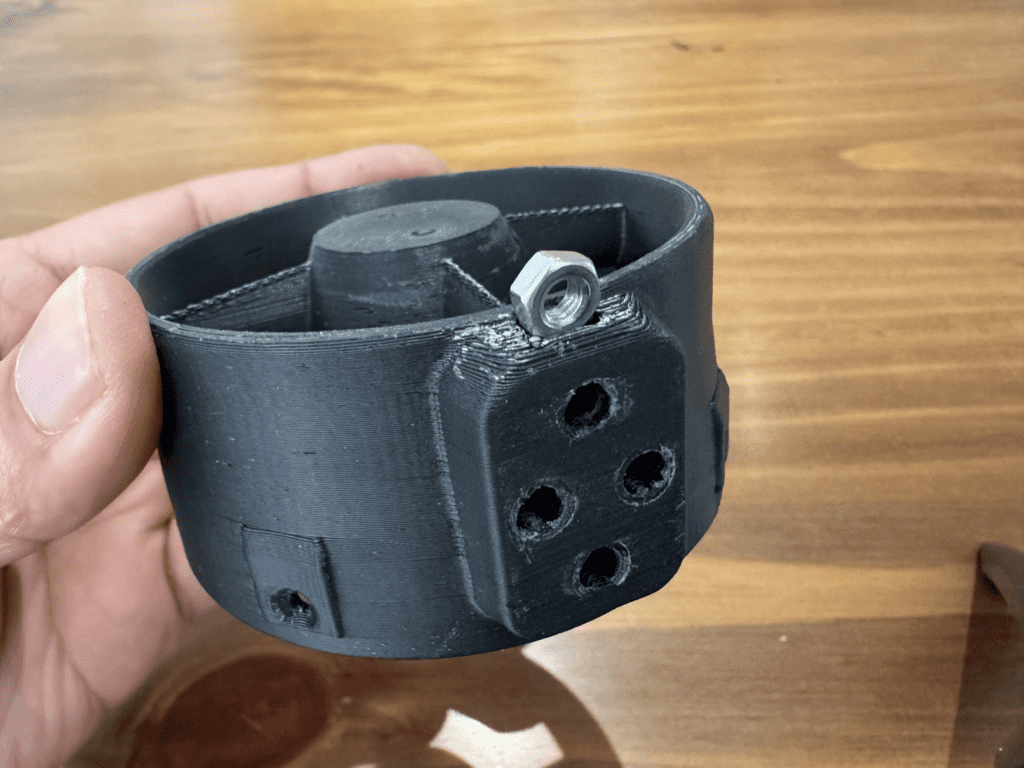
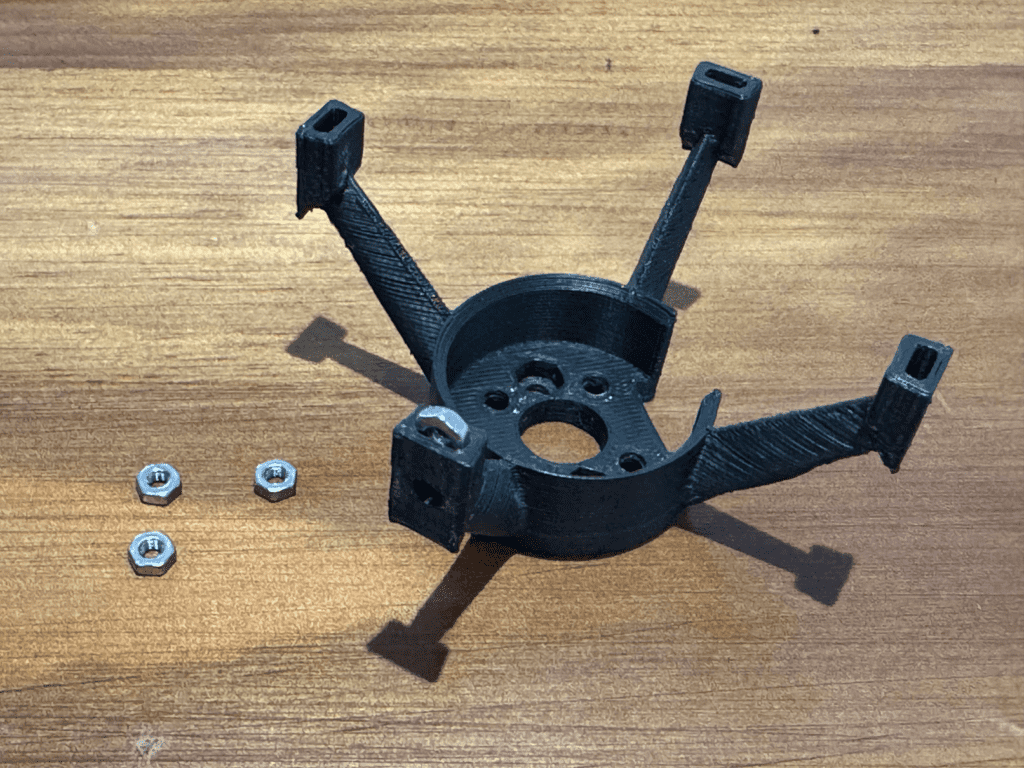
Inserta las cuatro tuercas M4 en las ranuras que tiene el ducto, estas tuercas nos ayudarán más adelante para fijar el propulsor sobre el cuerpo del AUV.
Paso 5 (si imprimiste la versión FDM)
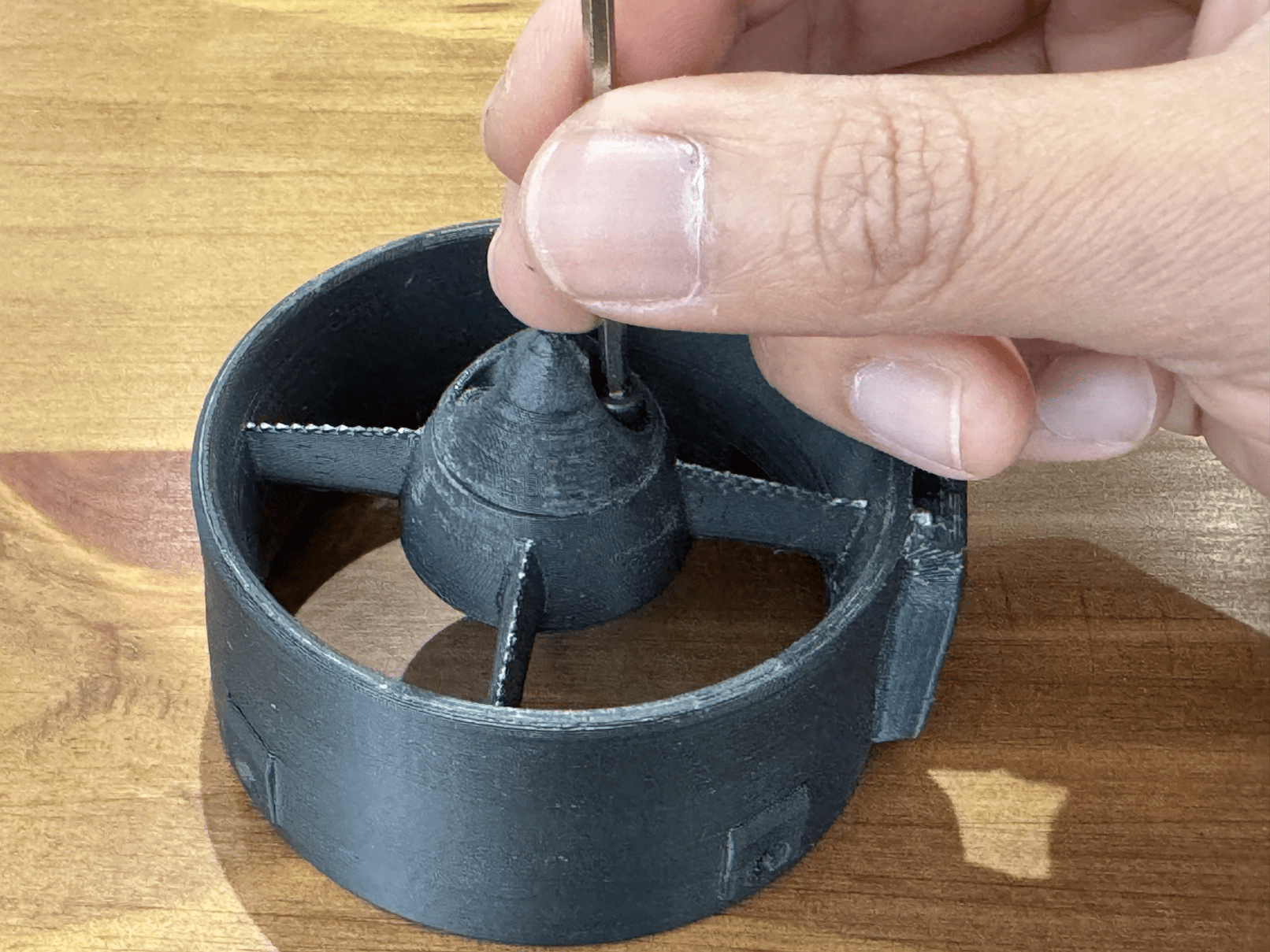
Inserta dos tuercas M3 en la parte interior del ducto de la carcasa y por la parte exterior posiciona el cono frontal de la carcasa. Asegura la posición del cono con los pernos M3x8.
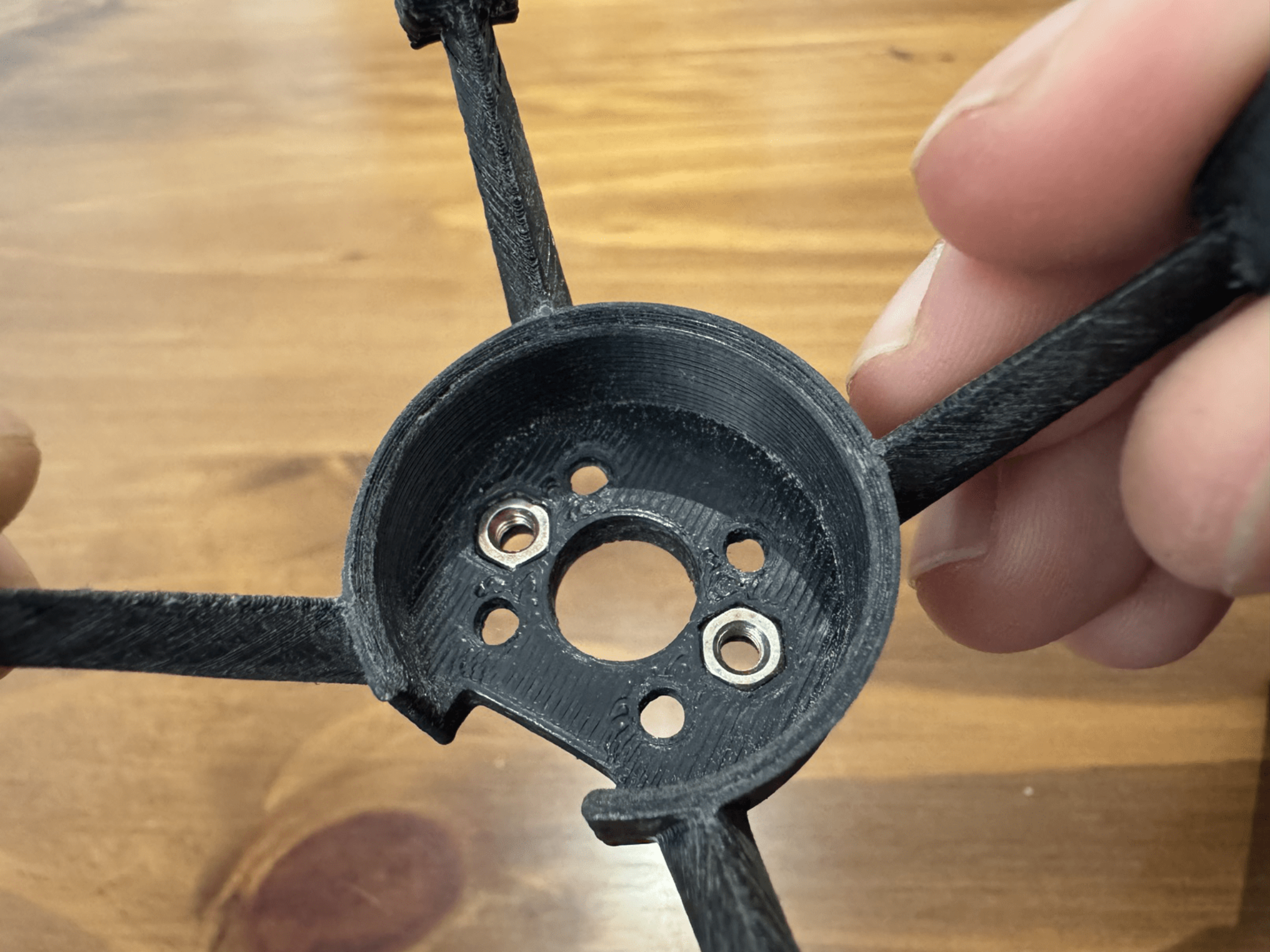
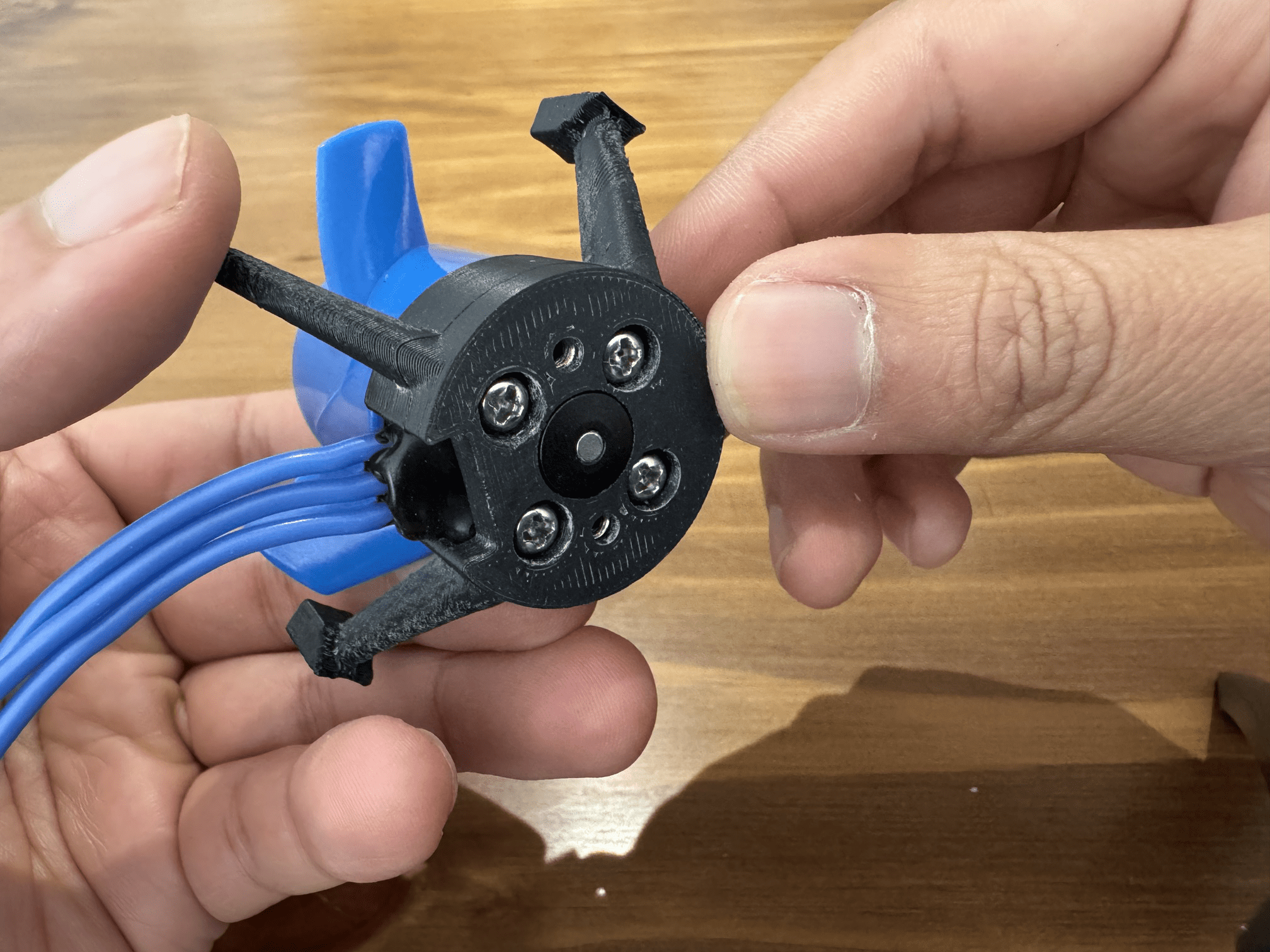
Paso 6
Inserta las cuatro tuercas M2.5 en las ranuras de la base impresa (como se muestra en la imagen) e inserta el ensamble previo en el ducto de la carcasa. Utiliza una llave allen para atornillar los pernos M2.5×6 y asegurar la unión entre ambas partes.
Paso 7
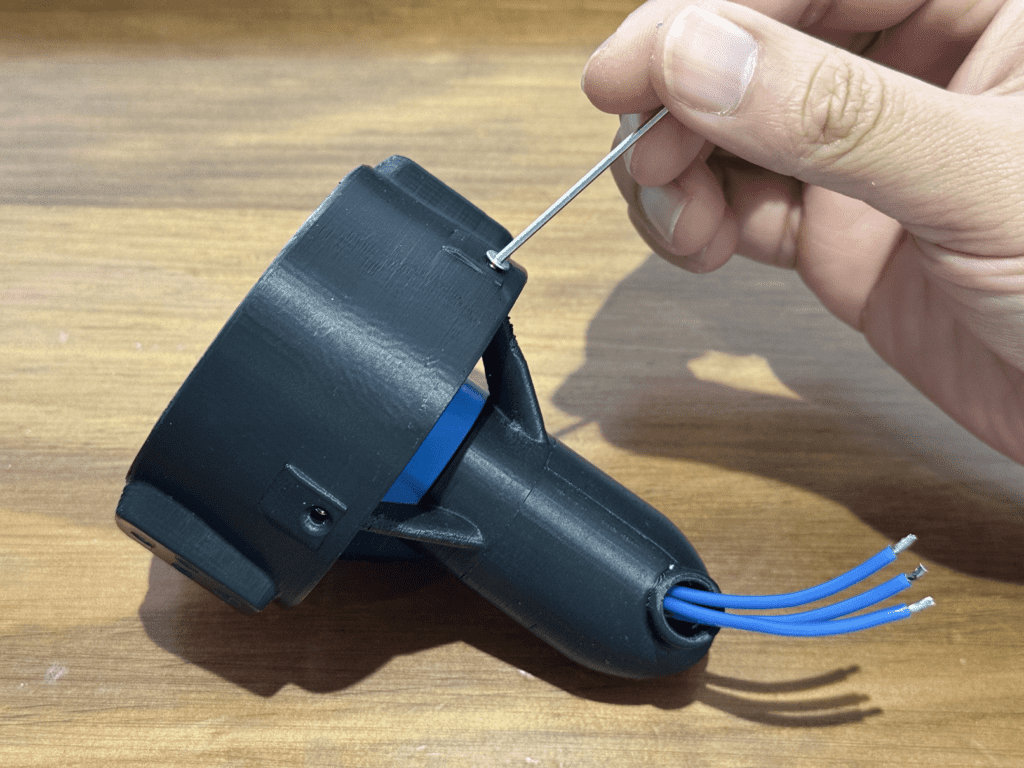
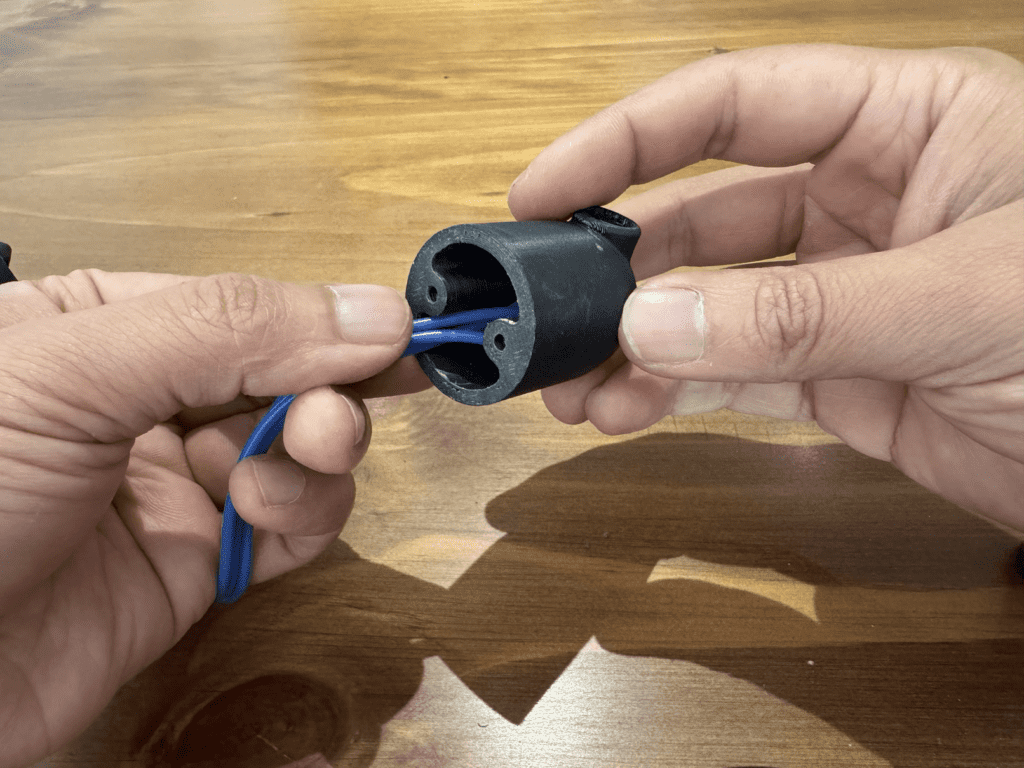
Pasa los cables del motor por el cono posterior y asegure la posición de este componente con dos pernos M3x8.
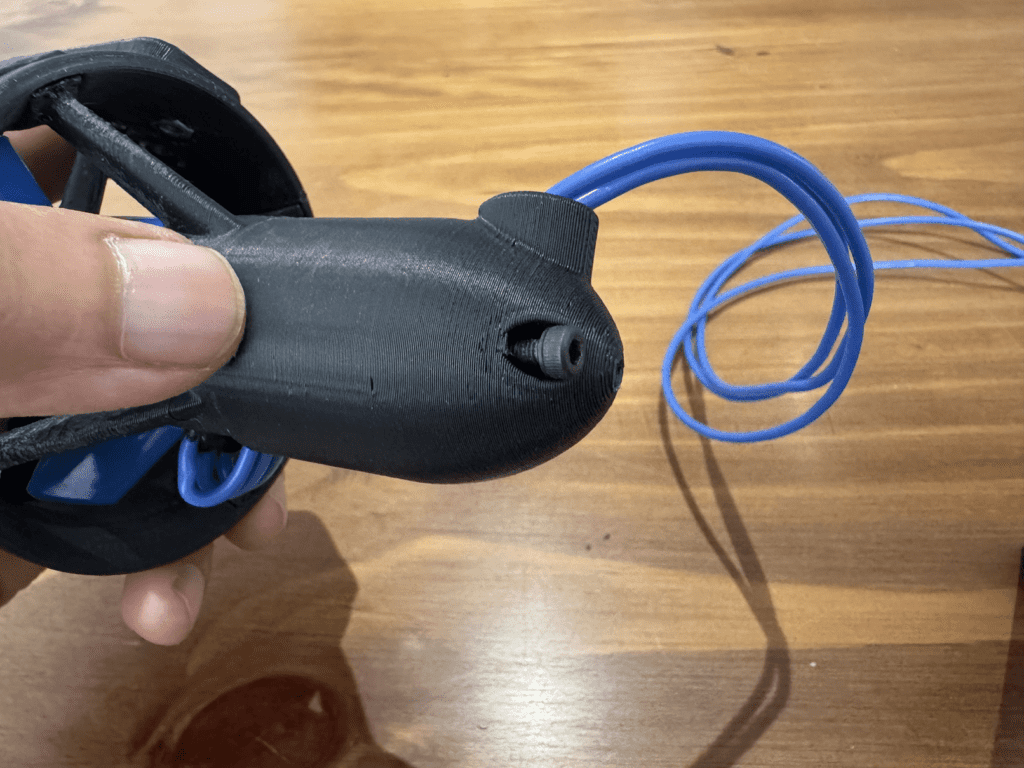
Con esto, los propulsores ya están listos para someterse a la conexión eléctrica y las primeras pruebas en seco y en agua, las cuales serán fundamentales para evaluar su desempeño real y ajustar cualquier detalle en el diseño o en la configuración de los componentes.

Control de velocidad del propulsor submarino
Para que el propulsor funcione, es necesario conectarlo a un sistema de control. Normalmente el controlador utilizado en motores brushless es conocido como ESC (Electronic Speed Controller) y en este caso utilizaremos el siguiente:
Controlador de velocidad
ESC bidireccional de 20A
Disipación de calor mejorada
Este controlador es el adecuado para nuestro motor brushless.
Click para comprar
Cada vez que haces una compra utilizando el link brindado arriba, ayudas a mantener con vida a este proyecto.
Pruebas de funcionamiento
Una vez completado el ensamblaje y las conexiones eléctricas (que mostraremos ahora), las pruebas de funcionamiento son esenciales para verificar que los propulsores del AUV operen de manera confiable bajo condiciones normales de trabajo. Estas pruebas se realizaron en dos fases: pruebas en seco (sin inmersión en agua) y pruebas en condiciones reales, bajo agua.
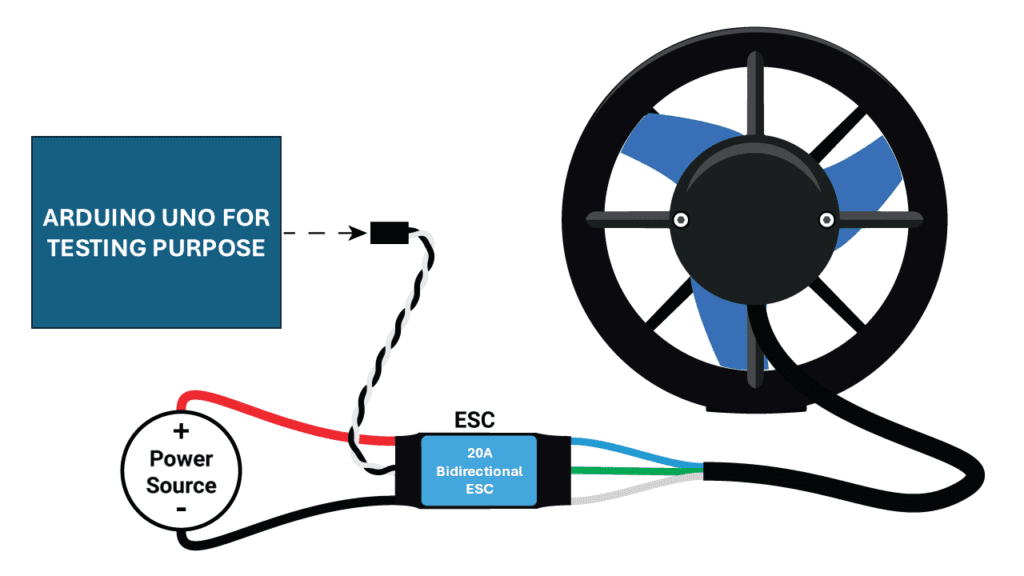
Conexión eléctrica de la prueba
Para realizar la prueba haremos una conexión eléctrica hacia una batería 4S (16.8V) de prueba y usaremos un Arduino UNO para generar una señal PWM que controlará la rotación del propulsor.
En ambos casos, dejaré un video para que puedan observar el funcionamiento.
Pruebas en seco
La primera prueba se llevó a cabo sin sumergir el sistema, con el objetivo de asegurar que los componentes eléctricos y mecánicos funcionaran correctamente antes de exponerlos al entorno acuático.
Prueba húmeda
La siguiente prueba se realizó sumergiendo el propulsor en agua, con el objetivo de verificar su funcionamiento cuando está expuesto al entorno acuático que es donde se desempeñará normalmente.
Conclusiones y siguientes pasos
Hemos completado esta iteración donde nos habíamos propuesto desarrollar y ensamblar un propulsor submarino 100% funcional. Considero que se ha cumplido el objetivo y por lo visto en la demostración, hemos cubierto el requerimiento o necesidad que teníamos cuando empezamos esta iteración. Como siguiente paso, se debe considerar imprimir y ensamblar los otros 4 propulsores que van a ser parte del vehículo.
Como objetivo para una siguiente iteración, vamos a proponernos diseñar una primera versión del casco del AUV ¡Estén atentos a lo que se viene!
1 comentario en «[AUV Ai Apaec] Prototipado del propulsor submarino»
Los comentarios están cerrados.