

En posts previos hemos realizado algunas definiciones importantes como la forma del casco y su estructura interna, por lo que en este post nos enfocaremos en el ensamblaje del cono posterior del AUV. Esta parte del AUV es muy importante porque es un soporte para varios componentes de gran relevancia para el desplazamiento y control del vehículo.
Diseño del cono posterior del AUV
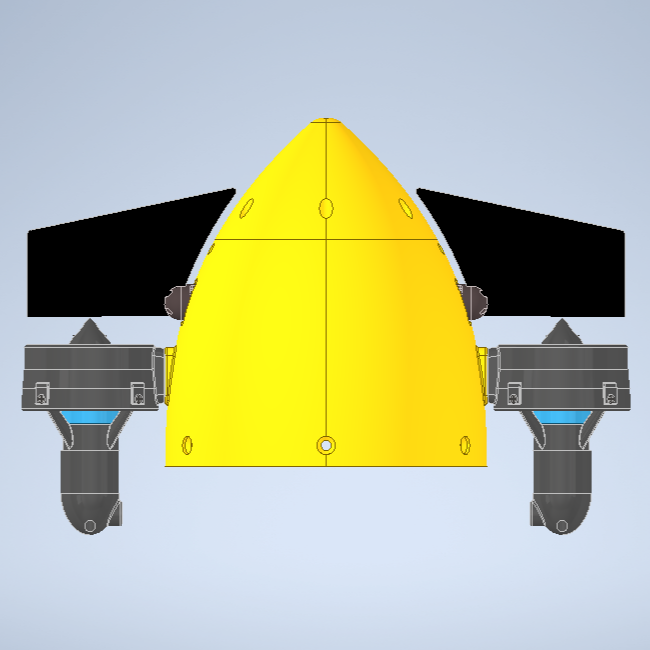
El cono posterior del AUV es una parte importante del vehículo ya que tiene instalado dos componentes principales del mismo, que son: los propulsores horizontales y los servomotores de las superficies de control de balanceo y cabeceo (roll y pitch).
Ya hemos mostrado el ensamblaje de los propulsores submarinos, por lo que me parece importante compartir la información sobre los servomotores que estamos usando en este proyecto.
Servomotor resistente al agua
Servo de alto torque
Resiste hasta 300m de profundidad
Equipado con engranajes metálicos muy robustos. Este servomotor despliega un alto torque con excelente precisión.
Click para comprar
Las piezas que componen a este ensamblaje serán impresas en 3D, lo que nos brindará un alto grado de adaptabilidad y versatilidad para los diseños y también nos va a permitir probar diferentes cambios o mejoras.
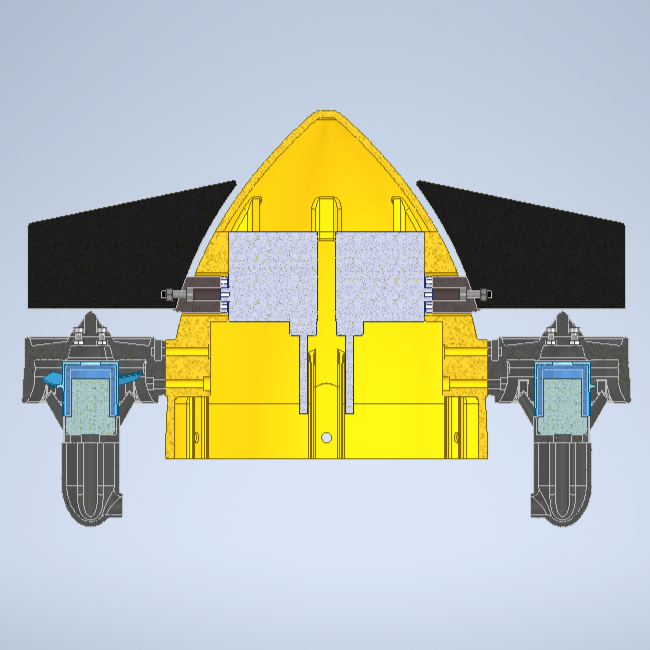
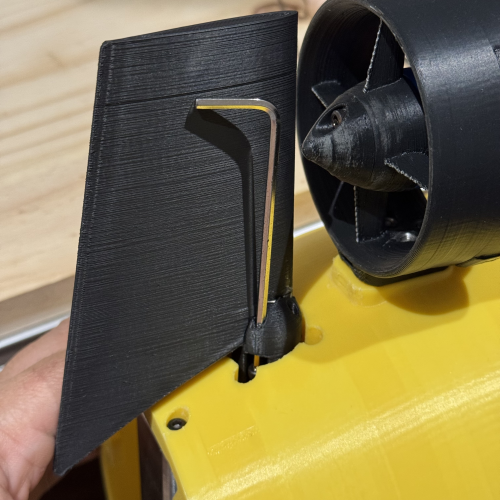
En la imagen se muestra el ensamblaje completo del cono posterior y también una vista de sección donde se observan los servomotores instalados y conectados con las superficies de control del AUV. El material que estamos usando de forma momentánea es el PLA, más adelante planeamos utilizar Nylon reforzado, pero para lograrlo haremos algunas modificaciones en nuestra impresora 3D que pronto estaremos compartiendo también.
Cono posterior del AUV
Cono posterior del AUV
Versión FDM disponible
Entra al link y descarga los archivos, de esta forma nos ayudas a mantener el proyecto andando.
Click para comprarEnsamblaje del cono posterior
Al igual que el propulsor submarino, este componente tiene un nivel de complejidad medio, y de la misma forma, empezaremos con la lista de materiales necesarios para este montaje:
- (1x) Kit de piezas impresas.
- (2x) Propulsores submarinos.
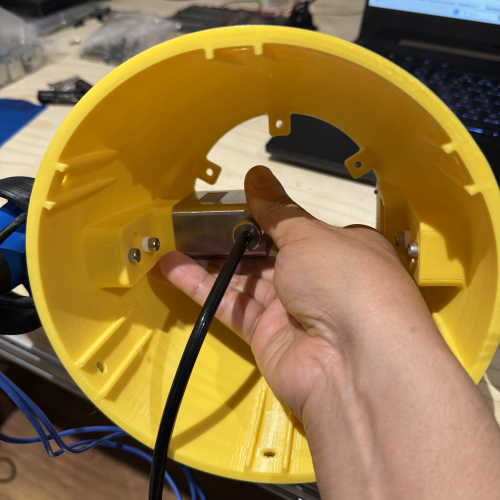
- (2x) Servomotores D30.
- (8x) Perno M4x35 INOX de cabeza cilíndrica.
- (20x) Perno M3x8 INOX de cabeza cilíndrica.
- (2x) Perno M4x16 INOX de cabeza cilíndrica.
- (2x) Tuerca M4 INOX.
Paso 1
Posiciona el propulsor submarino por la parte externa del cono y asegura su posición por la parte interna con 4 pernos M4x35. Repite este procedimiento con el otro propulsor.


Paso 2
Monta los servomotores y atornillarlos en posición.

Paso 3
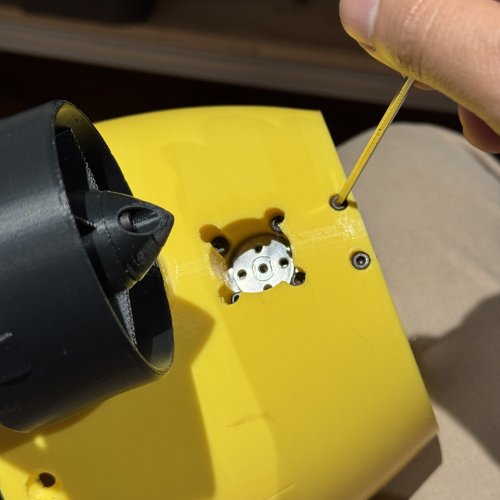
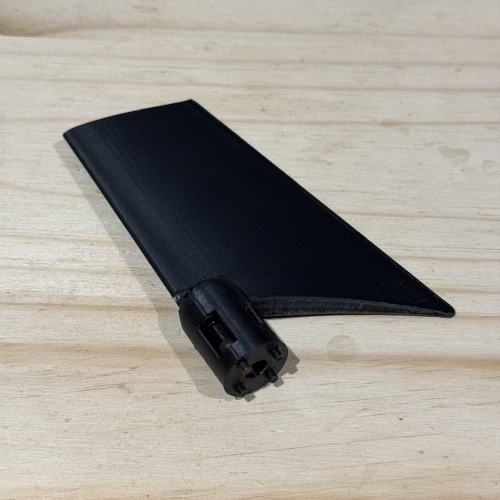
Insertar una tuerca M4 en la aleta impresa y luego insertar la aleta en la base impresa. Asegurar la fijación entre ambas piezas con un perno M4x12. Repite este procedimiento para la otra aleta y base.


Paso 4
Monta las aletas sobre los servomotores. Fija la posición con 4 pernos M3x8 en cada servomotor (inserta los pernos M3x8 previamente).

Conclusiones y siguientes pasos
Hemos completado esta iteración donde nos habíamos propuesto ensamblar el cono posterior, que es un sub-ensamblaje que une al sistema de propulsión y al de estabilización/dirección. En este punto de ensamblaje aún no hemos realizado una prueba de funcionamiento, pero en próximos posts estaremos mostrando el desempeño de este componente.
En la siguiente iteración vamos a abordar el ensamblaje de la estructura central del AUV. Esta parte del vehículo contiene un propulsor en dirección vertical y también los cilindros estancos donde embarcaremos toda la electrónica y baterías de este vehículo.