
Después del inicio del proyecto, iré compartiendo los avances en varias publicaciones hasta completarlo. Y, ¿por qué no?, más adelante podrían ver alguna entrada sobre mejoras al vehículo también. En esta etapa del proyecto, nos enfocaremos en un punto clave: la definición del criterio de selección de componentes que utilizaremos y el establecimiento de puntos clave para el diseño del vehículo. ¡Comencemos!
Sistema de tracción y motor
Tipo de tracción: 4×4
La tracción en las cuatro ruedas es esencial para proporcionar una mayor capacidad de movimiento en terrenos difíciles, garantizando que el vehículo pueda desplazarse por superficies irregulares como arena, barro, césped, y otros entornos que demandan mayor control y potencia.
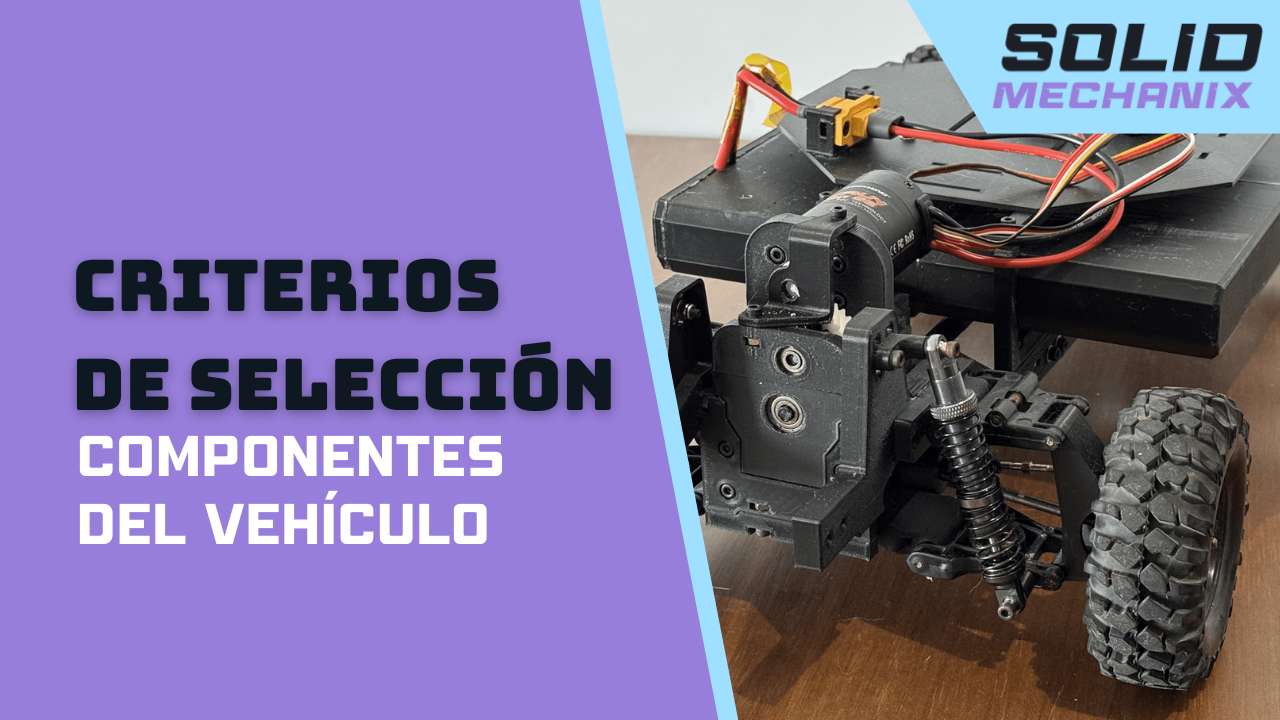
En este caso emplearemos un sistema de tracción centralizado: un solo motor acciona un eje que distribuye la potencia a las cuatro ruedas mediante un sistema de engranajes y diferenciales.
Selección de motor
Hay varios aspectos a tomar en cuenta, como el torque: si el vehículo va a operar en terrenos accidentados o cargar componentes adicionales, necesitarás motores con un torque elevado para superar la resistencia del terreno, o la velocidad, que dependerá de la aplicación. Si necesitas precisión en los movimientos, puedes optar por motores de baja velocidad con alto torque. En cuanto al voltaje y la corriente, ten en cuenta que los motores deben ser compatibles con el sistema eléctrico del vehículo, considerando el tipo de batería que utilices.
En este caso utilizaremos motores sin escobillas (o brushless) ya que estos motores son más eficientes y duraderos que los motores de corriente continua con escobillas. Ofrecen una mayor potencia y un mantenimiento mínimo, lo que puede ser útil cuando el vehículo esté en funcionamiento durante largos periodos de tiempo o en condiciones exigentes.
Diferenciales
El uso de diferenciales podría ser controversial, pero me parece una manera adecuada para distribuir la potencia de forma equitativa entre las ruedas del vehículo. El problema vendría cuando las ruedas estén en contacto con superficies de distinta tracción porque al no tener un controlador de tracción (podría ser un interesante upgrade), por ejemplo, una rueda sobre una superficie resbalosa o una rueda en el aire, la haría girar, llevándose toda la potencia por ese lado.
Aún así, los diferenciales permiten que las ruedas giren a diferentes velocidades sin perder potencia, mejorando el desempeño en terrenos irregulares.
Engranajes
Los engranajes del reductor de velocidad, por el momento, serán diseñador para optimizar la relación entre torque y velocidad, y serán impresos en 3D al igual que gran parte del vehículo. Es probable que usemos filamento flexible TPU para esta finalidad, así reducimos el desgaste y también el ruido de la caja de reducción.
En el caso de los engranajes de distribución de potencia (los engranajes ubicados en la reductora central), utilizaremos componentes metálicos que encontremos disponibles en el mercado, en páginas como Aliexpress.
Batería y sistema de alimentación
Tipos de batería
La batería es un componente crítico, ya que no solo alimentará los motores, sino también cualquier módulo adicional que se monte en el vehículo, como cámaras, sensores o brazos robóticos. Existen varios tipos de baterías que pueden ser utilizadas:
- Baterías de polímero de litio (LiPo): Son populares por su alta densidad de energía y ligereza. Las baterías LiPo ofrecen un buen balance entre capacidad, tamaño y peso, lo que las convierte en una excelente opción para vehículos a control remoto. Sin embargo, requieren cuidado en la manipulación y carga, ya que pueden ser sensibles a la sobrecarga y el calor.
- Baterías de níquel-hidruro metálico (NiMH): Son más seguras y robustas que las baterías LiPo, pero tienen una densidad energética menor. Son una opción más económica y fácil de manejar, pero pueden ser más pesadas, lo que puede afectar el rendimiento general del vehículo.
- Baterías de ion-litio (Li-ion): Estas baterías son similares a las LiPo, pero con una mayor estabilidad y ciclo de vida. Son ideales para proyectos en los que se requiere una autonomía prolongada y carga rápida.
Capacidad y autonomía
La capacidad de la batería (medida en miliamperios hora, mAh) determinará la autonomía del vehículo. Para garantizar un tiempo de funcionamiento adecuado, vamos a seleccionar una batería con suficiente capacidad para soportar tanto el sistema de tracción como los componentes adicionales. Es recomendable tener en cuenta el consumo energético de los motores y otros módulos para estimar la duración de la batería bajo condiciones de carga real.
En este punto del proyecto y pensando en una duración aproximada de 1h de movimiento, apuntaremos a adquirir o diseñar una batería de 15000 a 20000mAh.
Sistema de distribución de energía
Es posible que necesitemos algún UBEC por separado para regular el voltaje y asegurar que cada componente reciba la cantidad correcta de energía. Los sistemas electrónicos, motores o computadores de abordo pueden requerir diferentes niveles de voltaje, por lo que la distribución eficiente de la energía es fundamental para evitar sobrecargas o fallos.
Control y sistema de comunicaciones
Control remoto (RC)
El sistema de control remoto (RC) será la forma más sencilla de manejar el vehículo. Este tipo de control es ideal para aplicaciones donde el usuario necesita tener el control directo sobre el vehículo en tiempo real. Existen sistemas RC con diversas configuraciones, desde controles básicos con 2 canales (para movimiento hacia adelante y atrás, y giro) hasta controles más avanzados con múltiples canales que permiten manejar componentes adicionales.
En este proyecto utilizaré un Radio que ya tengo desde hace un par de años (es uno muy bueno y bastante completo):

Control autónomo
Si deseas que el vehículo tenga capacidades autónomas, puedes integrar un sistema autónomo como Pixhawk e incluso agregar una computadora de abordo como Raspberry Pi. Estos sistemas permitirán desarrollar algoritmos de control avanzados, como la navegación autónoma, seguimiento de objetos o la integración con sensores.
La Raspberry Pi es una opción potente que permitiría agregar funcionalidades avanzadas, como procesamiento de imágenes para cámaras, conexión a redes Wi-Fi para control remoto o el uso de inteligencia artificial para control autónomo.
Dependiendo del propósito del vehículo, es posible integrar cámaras para realizar grabaciones o transmisión de video en tiempo real, sensores de ultrasonido o infrarrojos para detectar obstáculos y facilitar la navegación autónoma, y también podríamos agregar una antena de GPS que nos brindaría posicionamiento de ser necesario.
Chasis y estructura
El chasis será la base física que soportará todos los componentes mencionados. Para garantizar la estabilidad y durabilidad del vehículo, debe ser:
- Resistente pero ligero: Materiales como el PLA, PETG o Nylon reforzados son buenas opciones para imprimir en 3D, ya que ofrecen resistencia a impactos sin comprometer demasiado el peso.
- Modular: El chasis debe ser fácilmente personalizable, con ranuras o puntos de fijación donde puedas montar y desmontar componentes de manera sencilla.
- Componentes adicionales: Hay componentes adicionales como los ejes CVD (los ejes que entregan la potencia desde el diferencial hacia la rueda), los amortiguadores o los ejes de distribución de potencia que iremos detallando paso a paso en los siguientes posts (todo es muy fácil de conseguir en Aliexpress).
Conclusiones
Así terminamos con los criterios de selección de componentes del vehículo. Quiero aprovechar para mencionar que a medida que el proyecto avanza, en cada post te compartiré una lista detallada de los componentes que estoy utilizando, junto con enlaces de descarga de archivos para imprimir en 3D y, si lo prefieres, opciones para comprar las piezas electrónicas o mecánicas que se requieran. Mi objetivo es que puedas seguir fácilmente cada etapa y, si lo deseas, construir tu propio vehículo 4×4 personalizado.
¡Asegúrate de seguir esta serie de posts para no perderte los detalles y los recursos que compartiré! Estoy emocionado por ver las versiones personalizadas y mejoradas que tú mismo puedas crear. ¡Nos vemos en el próximo avance!