

El ensamblaje del cono posterior del AUV Ai Apaec concentra dos de los sistemas más críticos para el desplazamiento y control del vehículo: los propulsores horizontales y los servomotores que gobiernan las superficies de control de cabeceo y balanceo (pitch y roll). Si ya revisaste la forma del casco y su estructura interna, este es el siguiente paso natural en la construcción.
Este artículo es parte del proyecto AUV Ai Apaec – [ver el proyecto completo].
Función del cono posterior en la dinámica del AUV
En un vehículo submarino autónomo, la sección de popa no es un simple cierre estructural: es el punto desde donde se gobiernan dos de los tres ejes de movimiento del vehículo. El cono posterior del Ai Apaec aloja los propulsores horizontales, responsables del empuje de avance, y los servomotores conectados a las aletas de estabilización, que controlan el cabeceo (pitch) y el balanceo (roll) mediante superficies de control activas.
El principio es análogo al de los timones de profundidad y estabilizadores laterales de un torpedo: las aletas no generan empuje, sino que vectorizan las fuerzas hidrodinámicas cuando el vehículo avanza. Esto tiene una implicación directa sobre el ensamblaje: la precisión en la alineación de servos y aletas tiene consecuencias reales sobre la estabilidad en vuelo submarino. Un servo mal orientado o una aleta con holgura introducen perturbaciones que el autopiloto tendrá que compensar continuamente, consumiendo energía y reduciendo la autonomía de misión.
Diseño del cono posterior del AUV
El cono posterior del AUV es una parte importante del vehículo ya que tiene instalados dos componentes principales: los propulsores horizontales y los servomotores de las superficies de control de balanceo y cabeceo (roll y pitch).
Ya habíamos mostrado qué componentes comprar para el ensamblaje de los propulsores submarinos, por lo que me parece importante compartir la información sobre qué servomotores estamos usando en este proyecto.
Servomotor resistente al agua
Servo de alto torque
Resiste hasta 300m de profundidad
Equipado con engranajes metálicos muy robustos. Este servomotor despliega un alto torque con excelente precisión.
Click para comprar
Las piezas que componen este ensamblaje serán impresas en 3D, lo que nos brinda un alto grado de adaptabilidad y versatilidad para los diseños y nos permite probar diferentes cambios o mejoras sin comprometer costo en mecanizado.
Selección de material: PLA para validar, Nylon como objetivo
Las piezas del cono posterior en esta iteración están impresas en PLA, un material apropiado para validar geometría, ajuste entre piezas y procedimientos de ensamblaje antes de comprometer material más exigente. El PLA permite iteraciones rápidas: si un soporte no encaja o una dimensión requiere ajuste, rediseñar e imprimir una pieza de reemplazo toma horas, no días.
La limitación es conocida: el PLA tiene una temperatura de deflexión de aproximadamente 60°C, absorbe humedad en operación continua y puede presentar degradación estructural a largo plazo en piezas en contacto con agua. La versión de producción usará Nylon reforzado, que ofrece mayor resistencia mecánica, mejor comportamiento ante ciclos de humedad y una temperatura de trabajo significativamente superior. Para imprimir Nylon en condiciones óptimas se requiere un hotend all-metal y un secador de filamentos activo —modificaciones que documentaremos en un artículo dedicado.
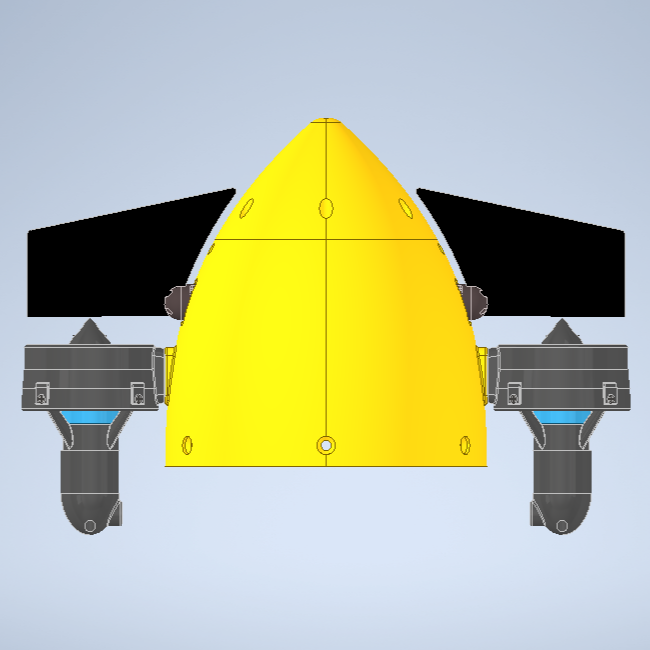
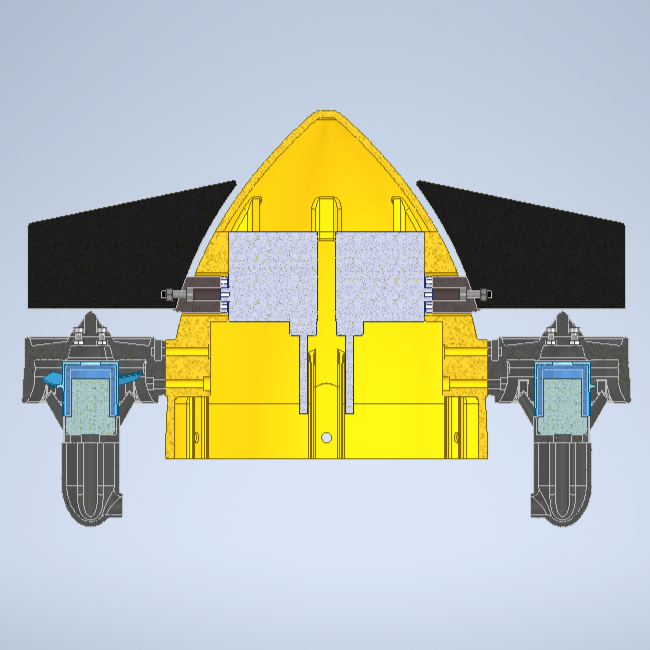
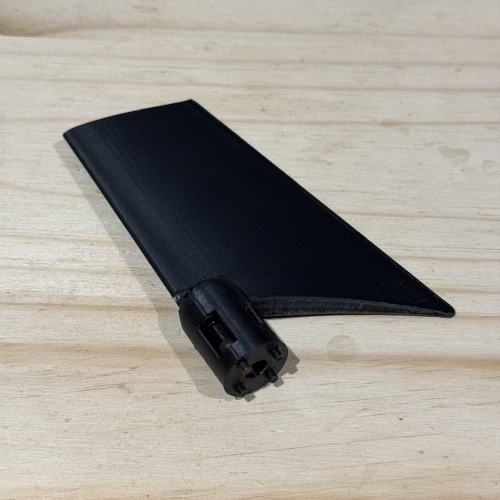
Cono posterior del AUV
Cono posterior del AUV
Versión FDM disponible
Entra al link y descarga los archivos, de esta forma nos ayudas a mantener el proyecto andando.
Click para comprarEnsamblaje del cono posterior del AUV
Al igual que el propulsor submarino, este componente tiene un nivel de complejidad medio. Empezaremos con la lista de materiales necesarios para este montaje:
- (1x) Kit de piezas impresas.
- (2x) Propulsores submarinos.
- (2x) Servomotores D30.
- (8x) Perno M4x35 INOX de cabeza cilíndrica.
- (20x) Perno M3x8 INOX de cabeza cilíndrica.
- (2x) Perno M4x16 INOX de cabeza cilíndrica.
- (2x) Tuerca M4 INOX.
Herramientas y preparación previa
Para este ensamblaje necesitas un juego de llaves allen métricas —principalmente la de 2.5 mm para los pernos M3 y la de 3 mm para los M4— y un destornillador de cabeza plana pequeño, útil para centrar las tuercas M4 en sus alojamientos antes de aplicar calor o presión. Un calibre de pie de rey es opcional pero recomendable para verificar que las piezas impresas no presentan deformación dimensional significativa antes de empezar a montar.
Antes de iniciar el montaje, inspecciona cada pieza impresa con luz directa. Busca delaminación, especialmente alrededor de los orificios de perno y las bridas de fijación de los servomotores: son los puntos que recibirán mayor esfuerzo de apriete. Una pieza con microfisuras en esa zona fallará con los primeros pernos —es preferible reimprimir antes de descubrirlo a mitad del ensamblaje.
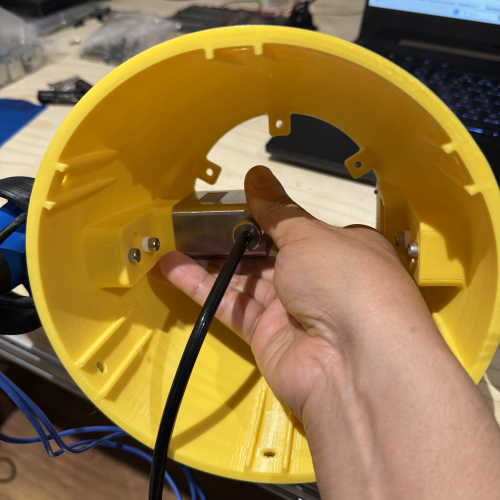
Paso 1: instalar los propulsores submarinos en el cono
Posiciona el propulsor submarino por la parte externa del cono y asegura su posición por la parte interna con 4 pernos M4x35. Antes de apretar definitivamente, verifica que el cuerpo del propulsor quede centrado en la abertura del cono y que las hélices tengan clearance suficiente sin rozar las paredes. Un propulsor descentrado, además de reducir la eficiencia de empuje, genera vibraciones asimétricas que se transmiten a toda la estructura. Si usas pernos INOX, no es necesario aplicar fijador de roscas en esta iteración de PLA: el par de apriete del M4 es suficiente y el fijador complica los desmontajes cuando necesites rediseñar piezas. Repite el procedimiento con el otro propulsor.


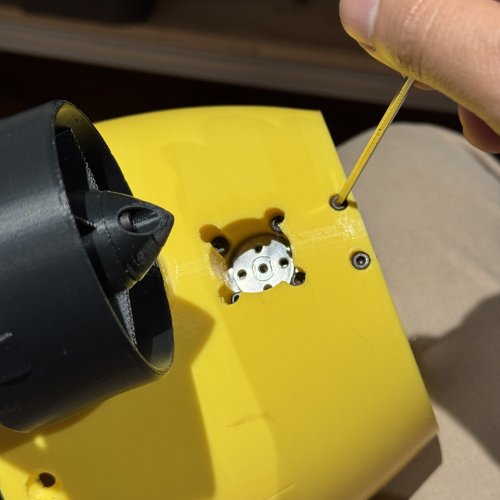
Paso 2: montar y fijar los servomotores
Posiciona cada servomotor D30 en su alojamiento dentro del cono. Antes de fijar, verifica la orientación del eje de salida: debe quedar alineado con el eje de pivote de la aleta que va a accionar. Un servo instalado con orientación incorrecta invierte la dirección de deflexión de la superficie de control, lo que obliga a desmontar el conjunto completo para corregirlo.
Fija cada servomotor con cuatro pernos M3x8, apretando de forma progresiva y cruzada —nunca uno a la vez hasta el fondo— para distribuir el esfuerzo uniformemente sobre la brida de montaje. Con piezas en PLA, un apriete concentrado en un solo punto puede fracturar la brida o introducir tensiones internas que se manifiestan como grietas después de varias sesiones de uso.

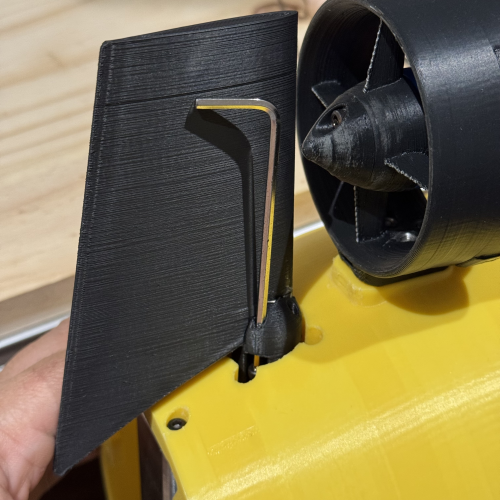
Paso 3: ensamblar las aletas de estabilización
El alojamiento para la tuerca M4 en la pieza impresa está diseñado para que la tuerca entre con presión controlada. Si la tolerancia es ajustada y no entra a mano, calienta ligeramente la tuerca con un soldador a temperatura baja (~150°C) y presiona con firmeza: el calor ablanda el PLA localmente y la tuerca queda embutida con mayor retención que con ajuste en frío. Esta es la técnica estándar de inserción térmica en impresión 3D y es significativamente más robusta que el simple encaje por presión. Si en cambio la tuerca entra con demasiada holgura, una gota de cianoacrilato en el alojamiento antes de insertar resuelve el problema.
Con la tuerca M4 en posición, inserta la aleta en la base impresa y asegura la fijación con un perno M4x12. Repite el procedimiento para la otra aleta y base.


Paso 4: montar las aletas sobre los servomotores
Antes de montar las aletas, verifica que los servomotores estén en su posición central. Si ya están conectados a la electrónica, envía una señal de 1500 µs (posición neutra estándar en PWM) para garantizar que el eje de salida esté a 0°. Si todavía no están conectados, ubica la posición central mecánica del servo —suele estar marcada en el tren de engranajes— y colócalo en ese punto antes de montar. Una aleta montada con el servo fuera de centro limita el rango de deflexión en uno de los dos sentidos, reduciendo la autoridad de control disponible para el autopiloto.
Con los servos centrados, inserta previamente 4 pernos M3x8 en la base de cada aleta, monta las aletas sobre los ejes de los servomotores y fija la posición apretando los pernos con la misma técnica cruzada del Paso 2.

Gestión del cableado en el cono posterior
Una vez montados los propulsores, los servomotores y las aletas, el cono posterior concentra cuatro cables de salida: dos de los propulsores submarinos (cada uno con sus tres conductores de fase) y dos de los servomotores (señal, alimentación y tierra). La forma en que colocas ese cableado antes de integrar el cono a la estructura central determina si el sistema va a ser mantenible o un nido de problemas.
El criterio principal es que ningún cable debe quedar en la trayectoria de una pieza móvil. Las hélices de los propulsores giran a alta velocidad y un cable mal ruteado que entre en contacto con ellas supone una falla catastrófica en operación. Antes de cerrar el ensamblaje, traza el recorrido de cada cable desde su conector hasta el punto de salida del cono y verifica que no haya interferencias, con la longitud suficiente para no tensarse cuando instalemos el cilindro de control, pero sin exceso de bucle que pueda desplazarse durante la operación.
El punto de penetración de los cables hacia el interior del casco es también un punto de vulnerabilidad para la estanqueidad. En esta iteración estamos validando el diseño mecánico, por lo que el sellado definitivo de las penetraciones de cable se abordará en una fase posterior. Por ahora, el objetivo es tener el cableado ordenado y documentado para facilitar la integración con la electrónica en la estructura central.
Errores comunes al ensamblar el cono posterior
Después de varias iteraciones de ensamblaje, estos son los problemas que aparecen con más frecuencia y que conviene anticipar.
Montar el servo sin centrarlo primero. Es el error más común y el más costoso en tiempo: la aleta queda físicamente centrada en 0° de deflexión visual, pero el servo internamente está desplazado. El resultado es un rango de movimiento asimétrico que el autopiloto interpreta como un offset de trim permanente. La solución es siempre verificar la posición neutra del servo antes de instalar la aleta, tal como se describe en el Paso 4.
Apretar los pernos M3x8 en secuencia lineal en lugar de cruzada. En bridas con cuatro puntos de fijación, apretar un perno a la vez hasta el fondo antes de pasar al siguiente concentra tensiones en un lado de la brida. Con PLA, esto puede abrir una grieta invisible que falla de forma brusca varias sesiones después.
No verificar el clearance de hélices antes de energizar los motores. Una hélice que roza ligeramente la pared del cono en estático puede generar un consumo de energía innecesario, o puede ser peor si consideramos una rotura de la hélice o un daño a la tobera del propulsor. La verificación manual en frío es el único momento para detectarlo sin riesgo.
Usar piezas con deformación no detectada. El PLA puede presentar warping sutil en piezas con geometría asimétrica. Un soporte de propulsor levemente curvado descentra el eje del motor y genera vibración. Si la pieza no asienta plana sobre una superficie de referencia, es mejor reimprimir.
No documentar la configuración de montaje de los servos. Si en alguna iteración futura cambias el firmware del autopiloto o recalibras los servos, necesitarás saber en qué posición mecánica estaba el servo cuando montaste la aleta. Una foto del conjunto antes de cerrar el ensamblaje tarda diez segundos y puede ahorrarte una hora de diagnóstico.
Verificación del sub-ensamblaje antes de integrar
Con el montaje completo, y antes de unir el cono a la estructura central del AUV, conviene hacer una verificación rápida. Hacerla aquí toma diez minutos; descubrir un problema después de integrar toda la estructura puede costar horas de desmontaje.
Clearance de hélices: gira manualmente las hélices de cada propulsor y verifica que la rotación sea completamente libre, sin rozar las paredes del cono ni entre sí. Cualquier contacto en seco se convierte en contacto bajo carga cuando los motores funcionan a plena potencia.
Rango de deflexión de aletas: si los servos ya están conectados, barre el rango completo de movimiento y confirma que cada aleta se deflecte simétricamente en ambas direcciones sin interferencia mecánica con el cuerpo del cono. La deflexión debe ser suave y sin puntos duros en el recorrido.
Holgura de pernos: revisa todos los puntos de fijación. Un perno que se mueve en operación submarina genera micro-movimientos que, con el tiempo, desgastan los alojamientos impresos en PLA hasta inutilizarlos.
Integridad de las piezas: inspecciona las zonas de apriete en busca de marcas blancas o microfisuras en el PLA —señal de tensión excesiva. Si encuentras alguna, es el momento de reimprimir esa pieza. Descubrirlo antes de la primera prueba en agua siempre es mejor que descubrirlo durante.
Conclusiones y siguientes pasos
Hemos completado el ensamblaje del cono posterior del AUV, un sub-ensamblaje que integra el sistema de propulsión y el de estabilización/dirección en un único bloque estructural. En este punto del proyecto todavía no hemos realizado una prueba de funcionamiento en agua, pero en próximas entregas mostraremos el desempeño real de este componente bajo condiciones operativas.
El siguiente paso es el ensamblaje de la estructura central del AUV: la sección que aloja el propulsor vertical y los cilindros estancos donde irán embarcados la electrónica y las baterías del vehículo.